Carlos Mastalli, Beomyeong Park, and Yisoo Lee are organizing the first edition of the Workshop entitled 'At the Crossroads of Control: Model-based VS Learning based Control for Humanoids' at Humanoids'25, Seoul, Korea.
In recent years, humanoid locomotion control has rapidly advanced through diverse paradigms, ranging from classical inverse dynamics to whole-body MPC, hybrid model-based-learning architectures, and end-to-end reinforcement learning (RL). Each offers distinct strengths in interpretability, scalability, and real-world adaptability. This workshop will bring together researchers with hands-on experience deploying these approaches on physical humanoids to examine which control strategies hold the most promise for future applications. Key questions include: Is whole-body MPC still the most robust option for structured environments? Can hybrid approaches truly combine the best of both worlds? Are end-to-end learned policies ready for full-body, contact-rich locomotion? Beyond benchmark metrics, we will highlight failure cases and deployment bottlenecks to evaluate not just algorithmic performance but also engineering feasibility. The goal is to explore whether the divide between model-based and learning-based control is real or fading, and what future control pipelines might require in terms of safety, adaptability, and maintainability. Topics of interest for this workshop are:

June 2024
webpage: https://www.tcoptrob.org/news/2024-06-12-best-paper/
the IEEE RAS TC on Model-based Optimization for Robotics selected our inverse-dynamics MPC paper as finalists. This year jury members were Dr. Ko Ayusawa, Dr. Fanny Ficuciello, Dr. Zachary Manchester, Dr. Ludovic Righetti, Dr. Olivier Stasse, and Dr. Wei Zhang. The TC received 25 submissions and 11 were selected for jury evaluation. The quality of the papers was particularly high and we had a few tied-up top papers which required a second round evaluation by the jury members. We are deligthed to this recognition, which shows the high quality of the research work we conducted at the Robot Motor Intelligence (RoMI) lab.

January 2024
webpage: https://sites.google.com/view/loco-manipulation-icra24
Carlos Mastalli, Julian Eßer, Ioannis Havoutis, Shivesh Kumar, Gabriel Margolis, Claudio Semini, Olivier Stasse, and Oliver Urbann are organizing the first edition of the Workshop entitled 'Loco-Manipulation: Algorithms, Challenges & Applications' at ICRA'24, Yokohama, Japan.
Locomotion and manipulation are two essential skills that enable robots to interact effectively with their environment. Recently, there has been significant interest in the robotics community regarding the integration of these skills, known as loco-manipulation. In this workshop, we will explore the latest advancements in loco-manipulation, covering topics such as
January 2024
webpage: https://atompc-workshop.github.io
Carlos Mastalli, Francesco Ruscelli, Enrico Mingo Hoffman, and Luis Sentis are organizing the second edition of the Workshop entitled 'Advancements in Trajectory Optimization and Model Predictive Control for Legged Systems' at ICRA'24, Yokohama, Japan.
Pursuing the thread initiated with the first edition of this workshop, we will focus on trajectory optimization and optimal control: successful approaches that exploit the robotic systems' dynamics, particularly under-actuated ones. In addition to traditional control techniques, this second edition of the workshop delves into the integration of machine learning approaches, such as reinforcement learning and deep learning. These approaches have gained tremendous traction in the field of planning and control due to their adaptability and ability to handle complex, non-linear systems.
This will be a fantastic opportunity to share your thoughts and recent work related to some trendy topics like:
November 2023
webpage: https://uktvplay.co.uk/shows/tony-robinsons-marvellous-machines/series-1/episode-5
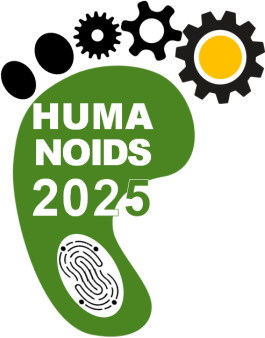
Our PI Carlos Mastalli introduced our research efforts on advancing autonomous inspecting capabilities on quadruped robots. Our work is featured in the Episote 5: Mechanical Menagerie. In this episote, Tony Robinson goes on safari to find majestic machines that are inspired by the animal kingdom and gets hands-on with a life-saving mechanical octopus.

October 2023
webpage: https://iros-2023-humanoid.github.io
Our PI Carlos Mastalli presented our work on 'agile and perceptive locomotion in legged robots' at IROS'23 Workshop on Reactive and Predictive Humanoid Whole-body Control (https://iros-2023-humanoid.github.io) in Detroit, USA. Carlos introduced our novel approaches for footstep region selection and swing trajectory planning. Additionally, he delved into the details of our inverse-dynamics MPC approach, including our numerical optimization and feedback MPC techniques. Our work enables the ANYmal robot to traverse challeging terrain conditions, such as damaged stairs and boxes.
Robot Motor Intelligence (RoMI) Lab
We are part of the National Robotarium and the Edinburgh Centre for Robotics at Heriot-Watt University.
Contact:
© Robot Motor Intelligence (RoMI) Lab, 2023