The Robot Motor Intelligence (RoMI) Lab focuses on research that enables robots with legs and arms to move and interact with the environment as agile as living beings. These are core capabilities in robotics systems that will revolutionize various industries and transform our society.
We are constantly seeking computational principles to architect the motor intelligence in any robot. With such intelligence, we aim that our robots process rich sensory stimuli, self-adapt against changes in the environment and robot's dynamics, and generate multi-contact motions. We are working in a range of different disciplines: numerical optimization, model predictive control, deep learning, robot design and perception. Our research activities are articulated into two axis:
Below, there is a selected list of exemplar research topics:

Legged locomotion is a core motor skills needed to transverse challenging terrains and to reach any place. With these skills, legged robots can deliver substantial advantages by offering mobility that is unmatched by wheeled counterparts. These motor skills require are highly dynamics and complex as the robots need to balance and negotiate with the conditions of the environment. It requires to build motion planning and control, perception and estimation modules. Our lab has substantial experience in advancing and developing these modules.
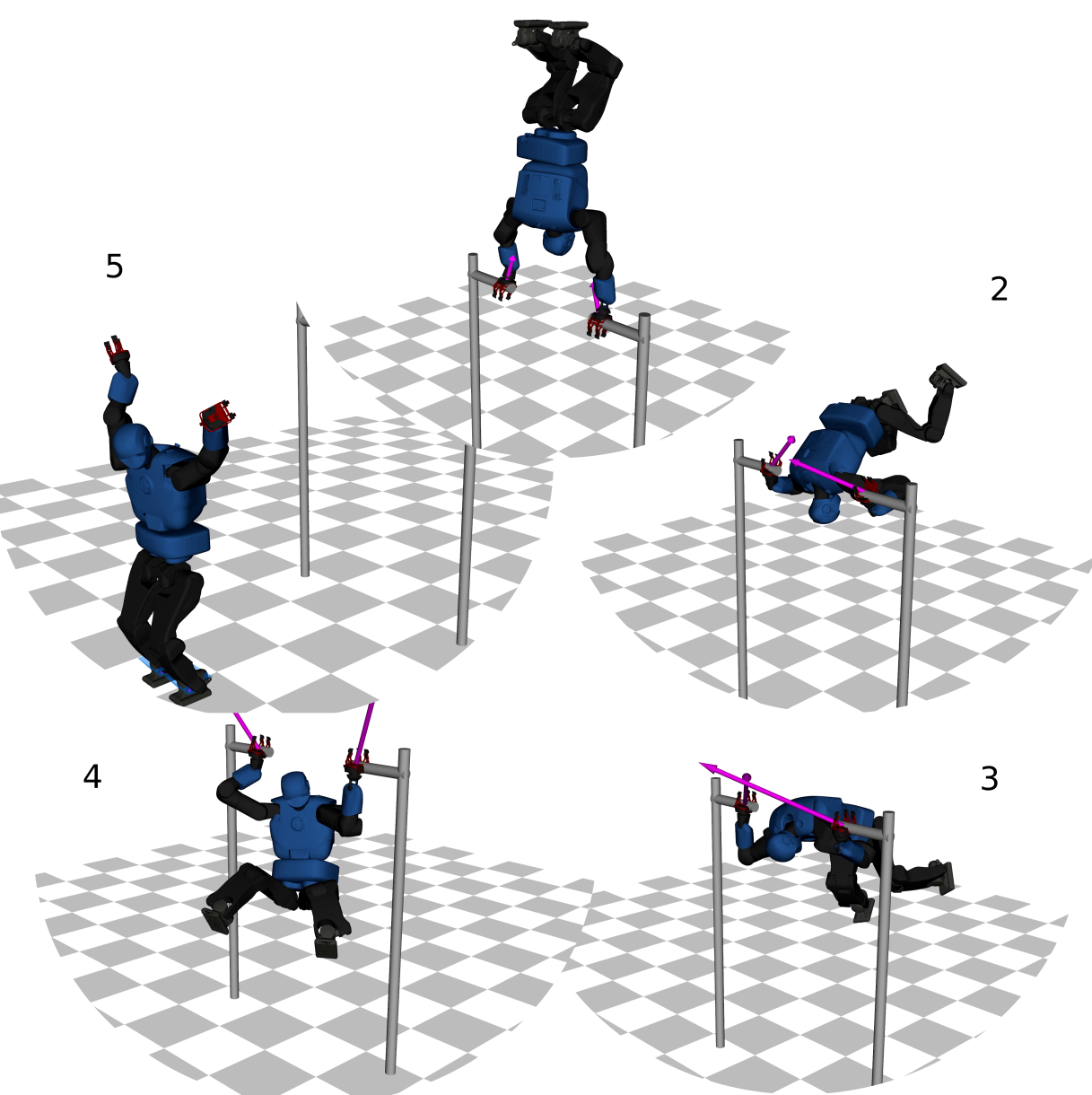
Optimal control for robotics is a powerful tool to synhesize motions and controls through task goals (cost/optimality) and constraints (e.g., system dynamics, interaction constraints). It aims to achieve complex motor maneuvers in real-time while formally considering its intrinsic properties: nonholonomics, actuation limits, balance, kinematic range, etc. Solving optimal control problems efficiently require (i) to exploit the temporal and functional structure and (ii) to develop numerical optimization algorithms with great convergence rate and computational speed. Our lab is committed to enhance the numerical capabilities of optimal control algorithms and share our methods to the robotics community as part of our Crocoddyl open-source library.
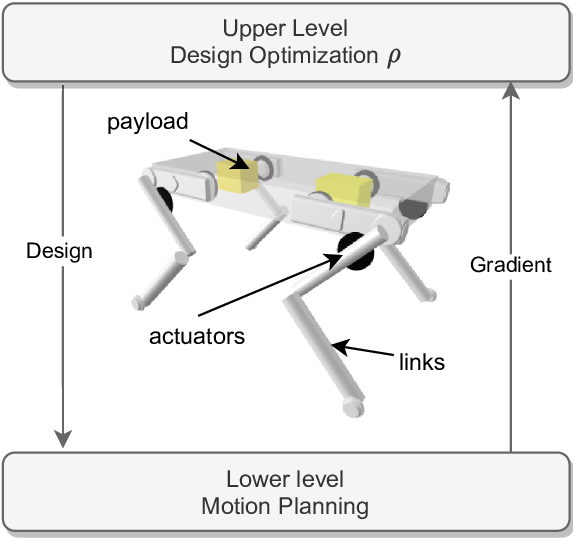
Designing robots that can achieve athletic maneuvers or run efficiently is a complex engineering task. This process requires experts in different fields: mechanical design, control, and electronics, and a numerous design iterations. The aim of the robot computational design is to reduce the complexity of this task and to optimize the design of robots given a set of expected tasks. However, this is a very larger and nonlinear optimization problem. Our lab focuses on tractable computational approaches to design the next-generation of legged robots.
Robot Motor Intelligence (RoMI) Lab
We are part of the National Robotarium and the Edinburgh Centre for Robotics at Heriot-Watt University.
Contact:
© Robot Motor Intelligence (RoMI) Lab, 2023