Designing robots that can achieve athletic maneuvers or run efficiently is a complex engineering task. This process requires experts in different fields: mechanical design, control, and electronics, and a numerous design iterations. The aim of the robot computational design is to reduce the complexity of this task and to optimize the design of robots given a set of expected tasks. However, this is a very larger and nonlinear optimization problem. Our lab focuses on tractable computational approaches to design the next-generation of legged robots.
To design a robot capable of executing dynamic motions, the engineers have to consider both the mechanical design of the robot and the motion it will enable. A traditional approach to robot design is to iterate between mechanical design and simulations with motion controller. Co-design aims to automate this process by optimizing both motions and design parameters while maximizing the robot’s capabilities for a set of desired tasks.
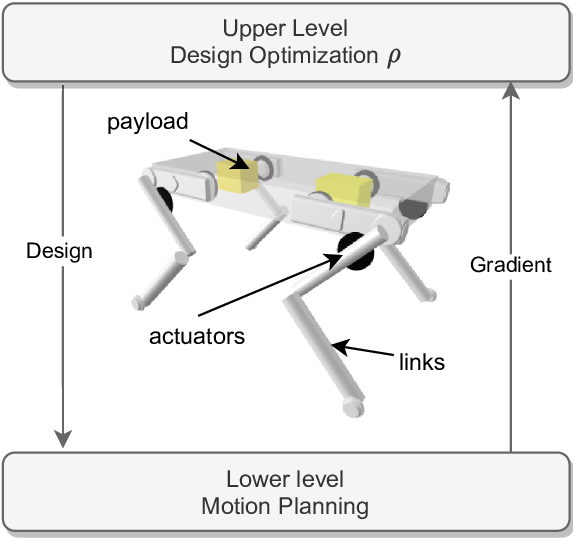
We propose a bi-level optimization approach that exploits the derivatives of the motion planning sub-problem (the inner level). Our approach optimizes the robot’s morphology and actuator parameters while considering its full dynamics, joint limits, and physical constraints such as friction cones. We demonstrate these capabilities by studying jumping and trotting gaits, showing it successfully minimizes the energy used in the Solo quadruped robot.
Last decades of humanoid research has shown that humanoids developed for high dynamic performance require a stiff structure and optimal distribution of mass–inertial properties. Humanoid robots built with a purely tree type architecture tend to be bulky and usually suffer from velocity and force/torque limitations.
This paper presents a novel series-parallel hybrid humanoid called RH5 which is 2 m tall and weighs only 62.5 kg capable of performing heavy-duty dynamic tasks with 5 kg payloads in each hand. The analysis and control of this humanoid is performed with whole-body trajectory optimization technique based on differential dynamic programming (DDP). We use this optimization technique to showcase preliminary experimental results on the RH5 humanoid robot.
Robot Motor Intelligence (RoMI) Lab
We are part of the National Robotarium and the Edinburgh Centre for Robotics at Heriot-Watt University.
Contact:
© Robot Motor Intelligence (RoMI) Lab, 2023